



研修室ブログ
日々スキルアップや自己研鑽に励む社員や、それをサポートする講師・間接部門スタッフがその日常をつづります。
- 2足歩行ロボットを歩かせるには?
-
2021年6月11日(金)のブログ
「歩く」を分解する。
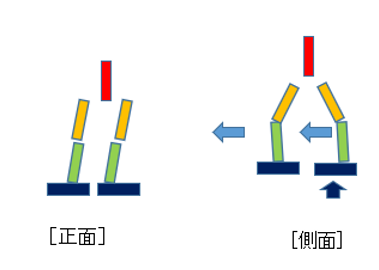
①左足重心移動(上半身は垂直を保ちつつ左足に重心を乗せる。上半身を左に傾けつつ上半身を垂直にする。)→できるのか?
②右足前に出す(右足が出ると同時に左足後ろに出す。重心が前方へ移動する。)→この時間の流れはどれだけ掛る?これにより、右足にも荷重がかかる。
③右足重心移動(上半身は垂直を保ちつつ右足に重心を乗せる。上半身を右に傾けつつ上半身を垂直にする。)→できるのか?
④右足を戻す(右足を戻すと同時に左足も戻す。右足に重心が掛かるので摩擦抵抗が高く、ここが支点になる。上体が前方へ移動する。)→この時間の流れはどれだけ掛る?
これでやっと半歩。先ほどの動作シーケンスの反対側、左足前動作を加えて1歩。これを繰り返せば前進、後退は重心荷重を反対にする、旋回は右足の歩幅と左足の歩幅を変えることで回転出来るだろう。・・・一応、頭の中のロボット歩行シミュレーションは、完成です。
この案で検討する事項は、
《1》重心移動はどれだけ傾ければ出来るのか?・・・ヒトの様に足が上がるなら良いが、足には重り代わりの電池がついているから上がらないかも?電池を外せば軽いから、上がるかもしれないが、上体に重心が移動する為にふらつきが予想される。バランス制御ができるのか?
《2》足を動かす速度はどれだけがいいのか?・・・足を出すと同時に重心移動が前に移動する。重心移動の前に足が前でないと前に倒れる。速く動かせればいいわけでもない。前に重心が移動するのだから人は自然と前のめりに姿勢になっている。速くなる程、前傾姿勢を保つ。現在の動作では、上半身は垂直を前提に考えているから、足が前に出て上半身が遅れてきそう=気持ち悪い動き
《3》ロボットの慣性動作を考慮しないといけない。・・・上半身では、腕の振りで右足と左肩で慣性を打ち消さないと揺れる。
《4》動作シーケンスの各サーボの移動速度はそれぞれ変える必要がある。・・・足を上げる動作速度と足を前に出す速度は、ヒトと同じで違うのではないか?そうなると、サーボへの指令時間差を作る必要がある。=さて、どうするか?
・・・・ 検討する項目が増え続けています。
※次回へ続く 筆者:組込み系講師 タグ:組込み系