



研修室ブログ
日々スキルアップや自己研鑽に励む社員や、それをサポートする講師・間接部門スタッフがその日常をつづります。
- 2足歩行ロボットの回路は?
-
2021年5月31日(月)
さて、前回からの続きで、回路の検討です。
9軸を同時に動かすのですから、CPUのIO端子が9個必要です。さらに、このサーボにはタイミングチャートがあります。
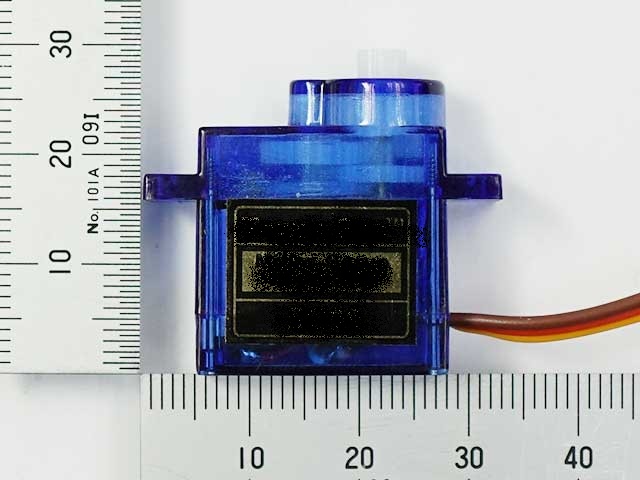
以下は部品の主な仕様です。
・PWMサイクル:20mS
・制御パルス:0.5ms~2.4ms
・制御角:±約90°(180°)
・配線:茶=GND、赤=電源[+]、橙=制御信号 [JRタイプ]
・トルク:1.8kgf・cm
・動作速度:0.1秒/60度
・動作電圧:4.8V(~5V)
・温度範囲:0℃ ̄55℃
・外形寸法:22.2x11.8x31mm
・重量:9g
0.5msで0度ということは、2.4msで180度です。
制御は、msで送るのは分かりにくいため、角度を命令として送ります。 これは、サーボ(ms)=関数(角度)と関数にします。
94.73684211 度/ms
0.011 ms/度
EXCEL近似式なら y = 0.0106x + 0.5 X=度 Y=ms
20ms毎にパルス幅を送りますので、PWM制御が必要であり、電源は5V必要です。
トルクは、1.8kgf・cm ですが、ロボットの自重を支えられるのか疑問です。
動作速度:60度動かすには0.1秒かかるため、20ms毎にPWM信号を送っても、受け取るとは思えないため、歩行させるには問題になりそうです。
また、このサーボは500mA必要ですから、かなり電力が不足しそうですし、そもそも回路の内部抵抗が高いほど電力は必要ですから、条件そのものが厳しそうです。
次回へ続きます。 筆者:組込み系講師 タグ:組込み系